Метод линеаризации. Метод линеаризации экспериментальных данных. Общий метод описания эквивалентных передаточных функций нэ
Зависимости
Обработка результатов косвенных измерений при нелинейной
Представление результатов измерений
Ввиду того, что каждый аргумент может иметь соответствующие доверительные границы неисключенной систематической и случайной погрешностей, то задача определения погрешности косвенного измерения в этих случаях делится на три этапа:
а) суммирование частных неисключенных систематических погрешностей аргументов;
б) суммирование частных случайных погрешностей аргументов;
в) сложение систематической и случайной составляющих погрешности.
Доверительная граница неисключенной систематической погрешности косвенного измерения при условии одинаковой доверительной вероятности частных погрешностей и их равномерного распределения внутри заданных границ определяется по формуле (без учета знака):
где θ y – доверительная граница неисключенной систематическо погрешности среднего значения X j -го аргумента. При отсутствии корреляционной связи между аргументами оценка СКО случайной погрешности косвенного измерения вычисляется по
где S x j – оценка СКО случайной погрешности результата измерения X j -го аргумента.
При нормальном распределении погрешностей косвенного измерения доверительная граница случайной составляющей погрешности вычисляется по формуле:
где t p – квантиль Стьюдента при доверительной вероятности P с эффективным числом степеней свободы k эф , определяемом при малых объемах выборки по формуле:
При больших объемах число степеней свободы находится по формуле
Доверительная граница суммарной погрешности результата косвенного
измерения определяется по правилам, изложенным выше.
Существуют два метода определения точечной оценки результата косвенного измерения и её погрешности: линеаризации и приведения.
Для косвенных измерений при нелинейных зависимостях и некоррелированных погрешностях измерений аргументов используется метод линеаризации. Метод линеаризации основан на том, что погрешность измерения значительно меньше измеряемой величины, и поэтому вблизи средних значений Xi аргументов нелинейная функциональная зависимость линеаризуется и раскладывается в ряд Тейлора (члены высокого порядка не учитываются). Линеаризуя функцию нескольких случайных аргументов (какими и являются результаты измерений и их погрешности), можно получить, как правило, достаточно простое выражение для вычисления оценок среднего
значения и среднего квадратического отклонения функции. Разложение нелинейной функции в ряд Тейлора имеет вид:
Метод линеаризации допустим, если можно пренебречь остаточным членом R . Остаточным членом
пренебрегают, если
где X S – среднее квадратическое отклонение случайных погрешностей результата измерения x i -го аргумента. Первое слагаемое правой части уравнения есть точечная оценка истинного значения косвенной величины, которая получается подстановкой в
функциональную зависимость средних арифметических X i , значений аргументов:
Второе слагаемое
есть сумма составляющих погрешности косвенного измерения, называемых частными погрешностями, а частные производные
Коэффициентами влияния.
Отклонения ΔXi должны быть взяты из полученных значений погрешностей и такими, чтобы они максимизировали выражение для остаточного члена R . Если частные погрешности косвенного измерения не зависят друг от друга, т. е. являются некоррелированными, и известны доверительные границы погрешности аргументов при одинаковой вероятности, то предельная погрешность (без учета знака) косвенного измерения вычисляется по формуле:
значения частных производных функциональной зависимости определяются при средних значениях аргументов
Этот метод, называемый максимум-минимум, дает значительно завышенное значение погрешности косвенного измерения. Относительно правильная оценка погрешности косвенного измерения, получается, по методу квадратического суммирования
В ряде случаев расчет погрешности косвенного измерения значительно упрощается при переходе к относительным погрешностям. Для этого используется прием логарифмирования и последующего дифференцирования функциональной зависимости. Когда предельная погрешность косвенного измерения, полученная по методу максимума-минимума.
Нв себя, L(0)=0, и дифференцируем по Фреше. Одним из классич. методов решения (1), связанным с линеаризацией (1), является итерационный метод Ньютона - Канторовича, в к-ром при известном приближении и n
новое приближение и n+
1 определяется как решение линейного уравнения
с итерационным параметром подлежащим выбору. При реализации упомянутых методов следует учитывать и приближенность решения систем (напр., как следствие применения вспомогательных итерационных методов) (см., напр., , , ). При рассмотрении нелинейных задач на собственные значения (задач нахождения точек бифуркации), напр. вида
идея линеаризации (5), сводящая исследование задачи (5) к исследованию линейной задачи на собственные значения
оказалась весьма плодотворной (см. - ). Часто используется та или иная линеаризация и в сеточных методах решения нестационарных нелинейных задач (см., напр., - ), проводимая за счет известных решений в моменты времени до t n
и дающая линейные уравнения для решения в следующий дискретный (t - шаг по времени). Лит.
: Красносельский М. А. [и др.], Приближенное решение операторных уравнений, т. 1, М., 1969 ; К о л л а т ц Л., Функциональный анализ и , пер. с нем., М., 1969; О р т е г а Д ж., Р е й н б о л д т В., Итерационные методы решения нелинейных систем уравнений со многими неизвестными, пер. с англ., М., 1975; Б е л л м а н Р., К а л а б а Р., Квазилинеаризация и нелинейные краевые задачи, пер. с англ., М., 1968; П о б е д р я Б. Б., в кн.: Упругость и неупругость, в. 3, М., 1973, с. 95-173; О д е н Д ж., Конечные элементы в нелинейной механике сплошных сред, пер. с англ., М., 1976; Зенкевич О., Метод конечных элементов в технике, пер. с англ., М., 1975; С в и р с к и й И. В., Методы типа Бубнова - Галеркияа и последовательных приближений, М., 1968; М и х л и н С. Г., Численная реализация вариационных методов, М., 1966; Futik S., Kratochvil A., Necas I., "Acta Univ. Corolinae. Math, et Phys.", 1974, v. 15, № 1-2, p. 31-33; Амосов А. А., Бахвалов Н. С., О с и-п и к Ю. И.; "Ж. вычисл. матем. и матем. физики", 1980, т. 20, № 1, с. 104-11; Е i s е n s t a t S. С., S с h u l t z М. Н., S h е r m a n А. Н., "Lect. Notes Math.", 1974, № 430, p. 131 - 53; Дьяконов Е. Г., в кн.: Численные методы механики сплошной среды, т. 7, № 5, М., 1976, с. 14-78; В о р о в и ч И. И., в кн.: Проблемы гидродинамики и механики сплошной среды. К шестидесятилетию акад. Л. И. Седова, М., 1969; Бергер М. С., в кн.: Теория ветвления и нелинейные задачи на собственные значения, пер. с англ., М., 1974, с. 71-128; Скрыпник И. В., Нелинейные эллиптические уравнения высшего порядка, К., 1973; Ладыженская О. А., Математические вопросы динамики вязкой несжимаемой жидкости, 2 изд., М., 1970; Дьяконов Е. Г., Разностные методы решения краевых задач, в. 2 - Нестациопарные задачи, М., 1972; Р и в к и н д В. Я., У р а л ь ц е в а Н. Н., в кн.: Проблемы математического анализа, в. 3, Л., 1972, с. 69-111; Fairweather G., Finite element Galerkin methods for differential equations, N. Y., 1978. ; L u s k i n M., "SIAM J. Numer. Analysis", 1979, v. 16, № 2, p. 284-99.
Е. Г. Дьяконов.
Математическая энциклопедия. - М.: Советская энциклопедия . И. М. Виноградов . 1977-1985 .
Смотреть что такое "ЛИНЕАРИЗАЦИИ МЕТОДЫ" в других словарях:
функциональная группа - 2.1.8. функциональная группа: Группа, состоящая из нескольких функциональных блоков, электрически взаимосвязанных между собой для выполнения заданных функций. Источник …
Численные методы решения методы, заменяющие решение краевой задачи решением дискретной задачи (см. Линейная краевая задача;численные методы решения и Нелинейное уравнение;численные методы решения). Во многих случаях, особенно при рассмотрении… … Математическая энциклопедия
Численные методы раздел вычислительной математики, посвященный методам отыскания экстремальных значений функционалов. Численные методы В. и. принято разделять на два больших класса: непрямые и прямые методы. Непрямые методы основаны на… … Математическая энциклопедия
У этого термина существуют и другие значения, см. Наследование. Диаграмма наследования классов в виде ромба. Ромбовидное наследование (… Википедия
Прогноз - (Forecast) Определение прогноза, задачи и принципы прогнозирования Определение прогноза, задачи и принципы прогнозирования, методы прогнозирования Содержание Содержание Определение Основные понятия прогностики Задачи и принципы прогнозирования… … Энциклопедия инвестора
Приближенные методы решения методы получения аналитич. выражений (формул), либо численных значений, приближающих с той или иной степенью точности искомое частное решение дифференциального уравнения (д. у.) или системы для одного или нескольких… … Математическая энциклопедия
Численные методы решения итерационные методы решения нелинейных уравнений. Под нелинейными уравнениями понимаются (см. ) алгебраические и трансцендентные уравнения вида где х действительное число, нелинейная функция, а под системой… … Математическая энциклопедия
Ур ния, не обладающие свойством линейности; применяются в физике как матем. модели нелинейных явлений в разл. сплошных средах. Н. у. м. ф. важная часть матем. аппарата, используемого в фундам. физ. теориях: теории тяготения и квантовой теории… … Физическая энциклопедия
- (от лат. linearis линейный), один из методов приближённого представления замкнутых нелинейных систем, при котором исследование нелинейной системы заменяется анализом линейной системы, в некотором смысле эквивалентной исходной. Методы… … Википедия
статическая - 3.7 статическая нагрузка: Внешнее воздействие, которое не вызывает ускорений деформируемых масс и сил инерции. Источник … Словарь-справочник терминов нормативно-технической документации
Книги
- Прогнозирование надёжности технологических процессов, инструмента и машин в обработке металлов давлением , Л. Г. Степанский. Пособие соответствует программе курса "Теория автоматического управления" . Рассмотрены математические модели и методы анализа устойчивости дискретных систем. Изложены методы гармонической и…
Частотные методы, получившие широкое распространение при анализе и синтезе линейных систем, имеют ряд преимуществ перед другими методами исследований: во-первых, простота составления и преобразования структурных схем и передаточных функций; во-вторых, удобство и большая наглядность расчетов с помощью частотных характеристик. Поэтому естественным было желание использовать эти методы при исследовании нелинейных систем. Это оказалось возможным на основе метода гармонической линеаризации нелинейных звеньев систем автоматического управления.
Основы метода гармонической линеаризации были изложены в работах выдающихся русских ученых Н. М. Крылова и Н. Н. Боголюбова в 1930-х гг. В дальнейшем идея этого метода применительно к системам автоматического управления была развита Е. П. Поповым и Л. С. Гольдфарбом.
Этот метод позволяет исследовать устойчивость нелинейных систем с определением параметров (амплитуда, частота) возможных автоколебаний, производить выбор корректирующих цепей, обеспечивающих заданные характеристики. При этом предполагается гармонический характер колебаний в нелинейной системе, что определяет решение поставленных задач в первом приближении. Однако для систем, линейная часть которых является фильтром низких частот, допускаемая погрешность невелика, и она будет тем меньше, чем выше фильтрующие свойства линейной части исследуемой системы.
Основная идея метода гармонической линеаризации заключается в следующем. Система автоматического управления представляется в виде двух частей - линейной и нелинейной (рис. 10.12). Пусть передаточная функция линейной части равна
- --- и уравнение линейной части имеет следующий Пр(р)
- (10.30)
Яр(р) = Х(р) = -Мр(р)ир(р).
и = /*(х),
где Р(х) - заданная нелинейная функция.
Нелинейная V
Линейная
Рис. 10.12. Представление АСУ в виде нелинейной и линейной части
В формуле (10.31) для простоты положено, что выходная координата нелинейного звена зависит только от величины входного сигнала и не зависит от его производных или интегралов, хотя рассматриваемый метод применим и к более сложным нелинейным зависимостям, а также к системам с несколькими нелинейными звеньями.
Ставится задача отыскания параметров автоколебаний нелинейной системы. Автоколебания в нелинейной системе предполагается синусоидальными, хотя, строго говоря, эти колебания имеют нелинейный характер. Однако ошибка такого предположения, как уже отмечалось, будет незначительной, так как ликерная часть системы, являющаяся фильтром низких частот, подавляет колебания с высокими частотами. Поэтому будем отыскивать автоколебания системы в виде синусоиды
х = A sin со/.
При входном синусоидальном сигнале на выходе нелинейного звена появятся некоторые периодические колебания. Их можно представить в виде бесконечного ряда гармонических составляющих
U = F(x) =
С 0 + Z), sin со/ + С, cos со/ + D 2 sin 2со/ + С 2 cos со/ + ..., (10.33)
где С 0 , />, С„ D 2 , С 2 , ... - коэффициенты ряда Фурье.
В дальнейшем для упрощения считаем, что постоянная составляющая на выходе нелинейного звена отсутствует. Это означает, что нелинейная характеристика симметрична относительно начала координат и входное воздействие не содержит постоянной составляющей. Учитывая фильтрующие свойства линейной части, можно пренебречь всеми высшими гармоническими составляющими ряда Фурье. Поэтому приближенно выходной сигнал нелинейного элемента можно выразить через первую гармонику ряда (10.33):
U = D. sin со/ + С. cosco/. 1 §
Из (10.32) находим:
sin со/ = -; cos со/ = А
Подставив (10.35) в (10.34), получим:
С, Ах
Ася сИ
Если обозначить (2 { (Л) = -0 2 (Л) = -, то будут справед-
ливы следующие выражения:
ОЛА) =
- 0ЛА) =
| /ХЛзіпф^іпфг/ф;
- (10.37)
| / г (Л8ІПф)С08фС/ф,
где ф = СО/.
Уравнение (10.36) в операторной форме принимает вид:
и(1р)=01(А)Х(р) + Я2Шр.х(р). (10.38)
В результате проведенных преобразований нелинейное уравнение (10.31) заменяется приближенным уравнением для первой гармоники (10.38), похожим на линеаризованное уравнение. Отличие заключается в том, что коэффициенты полученного уравнения не является постоянными величинами, а зависят от амплитуды А и частоты со отыскиваемых параметров автоколебаний.
Такая замена уравнений называется гармонической линеаризацией. Коэффициенты уравнения (10.38) О^А) и носят название гармонических коэффициентов усиления нелинейного звена.
Произведем гармоническую линеаризацию характеристики нелинейного элемента (рис. 10.13).
Рис. 10.13.
Для этого необходимо найти выражения для гармонических коэффициентов усиления нелинейного звена Q{A) и Q 2 (A) (10.37). На рис. 10.14 графически определен вид функции F^sincp) при синусоидальном входном сигнале нелинейного элемента x(t ) = ylsintp, cp = со/. Получаем:
- (2, {А) = - [ F(A sin vp)sin v))di = кА j 0
- - Г csin ldl = -(-COSV|/)|J* = -- (-cosy 2 + cosy,), кА J к А У| я A
так как у 2 = я - у 2 , то cosy 2 =-cosy, и Q } (A) = -cosy,.
Определяем 0 2 {Л):
Таким образом, уравнение (10.38) имеет следующий вид
Используя гармоническую линеаризацию характеристики нелинейного элемента, можно определить частоту и амплитуду возможных автоколебаний системы.
После подстановки (10.38) в (10.30) находим уравнение свободных колебаний в замкнутой нелинейной системе:
О р (р)Х(р) + М р (р) =0.(10.39)
На основании (10.39) характеристическое уравнение всей замкнутой системы будет иметь вид:
- (10.40)
Теперь необходимо найти периодическое решение х = /4$тсо/ исходного уравнения (10.39). Периодическое движение в системе возможно только в том случае, если соответствующее характеристическое уравнение (10.40) будет иметь пару мнимых корней. Для отыскания условий, при которых характеристическое уравнение будет иметь мнимые корни, можно воспользоваться любым критерием устойчивости линейных систем.
Рассмотрим критерий устойчивости Михайлова. Выражение для кривой Михайлова определяется характеристическим уравнением системы (10.40) при подстановке X = jQ.
»,№) + М/>П)0, (4)+ , (10.41)
где П - текущее значение частоты.
Выражение (10.41) можно переписать в виде
D(jQ) =и ] (П,а>,А) + уТ,(П,со,/1).
Следует заметить, что амплитуда и частота автоколебаний (А, со) входят как параметры уравнения кривой Михайлова. Для того чтобы система вышла на границу колебательной устойчивости, кривая Михайлова должна пройти через начало координат (рис. 10.15).
Известно, что частота, при которой кривая Михайлова пройдет через начало координат определяет частоту незатухающих колебаний в системе. В этом случае Q = со.
Таким образом, амплитуда и частота периодических колебаний в нелинейной системе л: = A sin соt могут быть определены при решении системы уравнений:
?/,(со,/!)-0; (10.43)
Е, (со, А) = 0.
Если полученные значения для А и со вещественные и положительные, то это означает, что в исследуемой системе возможны автоколебания с найденными значениями параметров. В противном случае автоколебания в системе возникнуть не могут.
После того, как параметры возможных автоколебаний будут определены, необходимо сделать проверку на устойчивость этого периодического решения, т. е. выяснить, сходится ли переходный процесс к периодическим колебаниям или нет (рис. 10.16). Для этого сообщают системе отклонение от периодического ре-
Рис. 10.16. а - решение сходится; б - решение расходится
шения по амплитуде (А + А А). Это приведет к отклонению кривой Михайлова от начала координат в ту или другую сторону (рис. 10.17). Устойчивым периодическим колебаниям соответствует положение 1, а неустойчивым - положение II деформированной кривой Михайлова. Для устойчивости автоколебаний необходимо, чтобы при АЛ > 0 кривая отклонялась в положение I, а при АА
|
К 8А) |
где индекс звездочка означает, что частные производные, взятые от общих выражений (10.42), вычисляются при подстановке параметров А, О. = со проверяемого периодического решения. Если неравенство (10.44) не выполняется, то это соответствует неустойчивому периодическому решению. Условие (10.44) справедливо при исследовании систем до 4 порядка включительно. Для систем более высокого порядка требуется просматривать ход всей кривой Михайлова.
При отсутствии автоколебательных режимов поведение исследуемой системы может быть самым различным. В настоящее время имеются приближенные способы определения переходного процесса в нелинейных системах при определенных входных воздействиях.
Рассмотрим пример. Для этого воспользуемся системой, рассмотренной в п. 10.3. На основании уравнений (10.21) и (10.23) составляется структурная схема исследуемой системы (рис. 10.18) и определяется передаточная функция линейной части:
Р(ЧР + 1)
м Р (р)
О р {р) "
|
р(Ър+) |
||||
Рис. 10.18. Пример исследуемой системы
Для характеристики нелинейного элемента (рис. 10.11???) находим выражения для гармонических коэффициентов усиления нелинейного звена:
Характеристическое уравнение замкнутой системы (10.40) с учетом (10.45) и (10.46) имеет следующий вид:
Х(Т{к + !) + &,
4СД X - ? -- ??
к А 2 со
После подстановки X = усо в (10.47) и разделения действительной и мнимой частей получаем уравнения (10.43) для определения амплитуды и частоты колебаний в нелинейной системе:
Решение полученных уравнений относительно А и со дает искомые параметры автоколебаний.
Контрольные вопросы
- 1. Каковы допущения при использовании метода гармонической линеаризации?
- 2. Произвести гармоническую линеаризацию характеристики нелинейного элемента (рис. 10.7, г) с параметрами Ь = 1,5; с = 5.
 Обсудим еще раз выбор масштаба для представления этих данных в графическом виде (см. рис.30). Максимальная метка °С, соответствующая оси температур Х, очень неплохо укладывается на 40 клетках, что соответствует очень удобному разделению по 10 клеток на кажые 50°С. А сколько надо дополнительных рисок? В этом случае предлагаю расставить их через 2 клетки, что придаст простоту определения координаты, так как интервал между такими рисками будет соответствовать 10°С, что очень удобно.
Обсудим еще раз выбор масштаба для представления этих данных в графическом виде (см. рис.30). Максимальная метка °С, соответствующая оси температур Х, очень неплохо укладывается на 40 клетках, что соответствует очень удобному разделению по 10 клеток на кажые 50°С. А сколько надо дополнительных рисок? В этом случае предлагаю расставить их через 2 клетки, что придаст простоту определения координаты, так как интервал между такими рисками будет соответствовать 10°С, что очень удобно.
А вот на оси Y я расставил риски через 5 клеток на кажые 500 Ом сопротивления, что привело к неполному использованию площади бумаги. Но, посудите сами, если разделить ось по 6 или 7 клеток, было бы неудобно находить координату, а если по 8 клеток, то максимальная риска, соответствующая 2000 Ом, не поместилась бы на оси.
Теперь надо обсудить вид теоретической кривой. Откроем методические указания по выполнению лабораторных работ на странице 28 и найдем фомулу 3, описывающую зависимость сопротивления полупроводника от темепературы ,
где – ширина запрещенной зоны, – постоянная Больцмана, – некоторая константа, имеющая размерность сопротивления, и, наконец, температура , выраженная в Кельвинах. Начнем оформлять новую таблицу. Во-первых, температуру переведем в Кельвины. Во-вторых, поставим себе задачу не только нарисовать новый график , но и найти с помощью графика ширину запрещенной зоны. Для этого прологарифмируем экспоненциальную зависимость и получим ![]()
Обозначим , , и . Тогда получим линейную зависимость ,
которую мы и будем изображать на графике. Данные, соответствующие значениям и , запишем в таблицу 9.
Таблица 9. Пересчет данных таблицы 8.
| номер точки | ||||||||||
| T, K | ||||||||||
| 1/T , 10 –3 K –1 | 3,34 | 3,19 | 3,00 | 2,83 | 2,68 | 2,54 | 2,42 | 2,31 | 2,21 | 2,11 |
| lnR , Ом | 7,62 | 7,51 | 7,25 | 7,06 | 6,99 | 6,74 | 6,61 | 6,56 | 6,36 | 6,34 |
 Если по данным таблицы 9 построить график зависимости на рис.31, то все экспериментальные точки займут совсем немного места на листе при большом пустом пространстве. Почему так получилось? Потому что по осям Х и Y метки расставлены начиная от 0, хотя значения, например, начинаются только со значения . Обязательно ли делать начальную метку равную 0? Ответ на этот вопрос зависит от поставленных задач. В примере с маятником Обербека (см. рис.28) было очень важным найти пересечение оси Х теоретической прямой в точке с координатой Y=0, что соответствовало значению . А в этой задаче надо найти только ширину запрещенной зоны, которая связана с постоянной , соответствующая коэффициенту наклона прямой на рис.31, поэтому совсем не обязательно расставлять метки на осях, начиная с 0.
Если по данным таблицы 9 построить график зависимости на рис.31, то все экспериментальные точки займут совсем немного места на листе при большом пустом пространстве. Почему так получилось? Потому что по осям Х и Y метки расставлены начиная от 0, хотя значения, например, начинаются только со значения . Обязательно ли делать начальную метку равную 0? Ответ на этот вопрос зависит от поставленных задач. В примере с маятником Обербека (см. рис.28) было очень важным найти пересечение оси Х теоретической прямой в точке с координатой Y=0, что соответствовало значению . А в этой задаче надо найти только ширину запрещенной зоны, которая связана с постоянной , соответствующая коэффициенту наклона прямой на рис.31, поэтому совсем не обязательно расставлять метки на осях, начиная с 0.
 Изучая данные из табл.9 и подбирая удобный масштаб, можно с уверенностью сказать, что ориентацию миллиметровой бумаги нужно изменить, как показано на рис.32. Самостоятельно изучите выбранный масштаб и убедитесь в том, что он очень удобен для работы с графиком. На теоретической прямой (проведенной на глаз наилучшим способом между экспериментальными точками) поставим две точки А и В с координатами и . Коэффициент наклона выразим через координаты этих точек по формуле
Изучая данные из табл.9 и подбирая удобный масштаб, можно с уверенностью сказать, что ориентацию миллиметровой бумаги нужно изменить, как показано на рис.32. Самостоятельно изучите выбранный масштаб и убедитесь в том, что он очень удобен для работы с графиком. На теоретической прямой (проведенной на глаз наилучшим способом между экспериментальными точками) поставим две точки А и В с координатами и . Коэффициент наклона выразим через координаты этих точек по формуле
И, наконец, вычисляем ширину запрещенной зоны
Методом парных точек рассчитаем этот же коэффициент и его погрешность , для этого рассмотрим пары точек из таблицы 9:
1–4, 2–5, 3–6, 4–7, 5–8, 6–9 и 7–10.
Рассчитаем для этих пар точек коэффициенты наклона прямых, которые проходят через них
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Среднее значение
![]() ,
, ![]()
Теперь рассчитаем ширину запрещенной зоны и ее погрешность .
Таким образом мы пришли к ответу
![]() эВ
эВ
Самостоятельная работа.
Предлагаю вам проделать самостоятельные рассчеты, построения и обработку графиков в следующей виртуальной лабораторной работе под кодовым названием "Определить жесткость пружины". Но поднимем планку Эксперимента на более высокий уровень: надо не просто получить число, но сравнить два метода измерения жесткости пружины – статический и динамический.
Кратко рассмотрим эти методы.
Статический метод.
Если подвесить к закрепленной вертикальной пружине груз массой , то пружина растянется на согласно закону Гука, где – длина растянутой пружины, а – длина нерастянутой пружины (начальная длина).
Примечание: закон Гука говорит о пропорциональности силы упругости пружины абсолютному удлинению , т.е. , где – коэффициент упругости (или жесткость) пружины.
В состоянии равновесия сила тяжести груза уравновесится силой упругости и мы можем написать . Раскроем скобки и увидим зависимость длины пружины от массы груза
Если сделать замену переменных , то получится уравнение прямой . Не надо делать линеаризацию!
Итак, перед вами стоит задача обработать данные из таблицы 10, которые были занесены туда юным Экспериментатором (ему надоело бросать кирпичи с крыши девятиэтажного дома). Для опытов он запасся набором грузов, нашел десяток-другой разных пружин и, подвешивая грузы разных масс, замерял длину растянутой пружины с помощью миллиметровой линейки.
Задание 1.
1. Выберите номер пружины из таблицы 10.
2. Составьте свою таблицу из двух столбцов. В первый столбец занесите силу тяжести , где – масса груза (в кг), м/с 2 . Во второй столбец перенесите значения длин выбранной пружины (в метрах). Предусмотрите ячейки для средних значений и .
Таблица 10.
| m, г | l , см | l , см | l , см | l , см | l , см | l , см | l , см | l , см | l , см |
| 11,8 | 15,4 | 17,6 | 19,4 | 13,2 | 15,4 | 19,6 | 21,4 | 11,2 | |
| 12,3 | 16,5 | 18,3 | 21,5 | 14,3 | 16,5 | 21,3 | 22,4 | 11,7 | |
| 13,6 | 17,6 | 19,3 | 21,6 | 14,8 | 16,5 | 22,1 | 22,6 | 12,7 | |
| 14,1 | 18,2 | 21,5 | 22,1 | 15,6 | 17,3 | 21,5 | 23,7 | 13,1 | |
| 16,6 | 22,3 | 22,5 | 24,9 | 17,6 | 19,9 | 23,9 | 25,5 | 15,4 | |
| 21,6 | 25,6 | 27,4 | 29,5 | 21,4 | 23,8 | 27,7 | 29,9 | 18,3 | |
| 22,5 | 26,4 | 28,8 | 31,4 | 22,6 | 24,2 | 28,8 | 32,1 | 19,6 | |
| 23,3 | 27,9 | 29,4 | 31,7 | 23,8 | 25,6 | 29,5 | 31,7 | 22,1 | |
| 26,2 | 32,1 | 32,0 | 34,3 | 25,5 | 27,9 | 31,9 | 33,6 | 22,2 | |
| 27,8 | 31,4 | 33,7 | 35,3 | 27,6 | 29,1 | 33,2 | 35,3 | 23,1 |
Таблица 10 (продолжение)
| m, г | l , см | l , см | l , см | l , см | l , см | l , см | l , см | l , см | l , см |
| 15,1 | 17,1 | 19,3 | 11,4 | 15,3 | 19,0 | 10,8 | 15,2 | 19,1 | |
| 15,6 | 17,7 | 19,7 | 11,6 | 15,6 | 19,6 | 11,5 | 15,3 | 19,3 | |
| 16,7 | 18,5 | 21,2 | 12,0 | 16,1 | 20,4 | 12,3 | 16,3 | 20,2 | |
| 17,3 | 19,3 | 21,4 | 12,5 | 16,5 | 20,7 | 12,4 | 16,7 | 20,4 | |
| 19,4 | 21,1 | 23,5 | 14,9 | 18,9 | 22,4 | 14,2 | 18,0 | 21,8 | |
| 22,3 | 24,6 | 26,3 | 17,4 | 21,4 | 25,8 | 16,5 | 20,7 | 24,4 | |
| 23,5 | 25,6 | 27,0 | 18,2 | 22,3 | 26,1 | 17,2 | 21,6 | 25,7 | |
| 24,4 | 26,1 | 28,5 | 19,4 | 23,3 | 27,0 | 18,4 | 22,0 | 26,4 | |
| 26,4 | 28,5 | 31,1 | 20,3 | 24,5 | 28,6 | 19,3 | 23,5 | 27,3 | |
| 27,0 | 29,0 | 31,4 | 21,9 | 25,8 | 29,9 | 20,7 | 24,7 | 28,5 |
3. Возьмите лист миллиметровой бумаги, нанесите на ней оси координат. В соответствии с данными выберите оптимальный масштаб и постройте график зависимости силы тяжести от длины пружины , откладывая значения вдоль оси Х, а величины вдоль оси Y.
4. Составьте 7 пар точек: 1-4, 2-5, 3-6, 4-7, 5-8, 6-9, 7-10. Методом парных точек рассчитайте 7 коэффициентов наклона по формуле
И т.д.
5. Найдите среднее значение , что соответствует среднему значению коэффициента упругости пружины .
6. Найдите среднеквадратичное отклонение ![]() , доверительный интервал
, доверительный интервал ![]() , (т.к. получено 7 значений ). Представьте результат в виде
, (т.к. получено 7 значений ). Представьте результат в виде
Дополнительное задание (необязательное)
7. Рассчитайте начальную длину пружины. Для этого получите выражение для коэффициента из уравнения равновесия и подставьте в него средние значения
![]()
8. Рассчитайте доверительный интервал для коэффициента
![]()
9. Учитывая, что , рассчитайте начальную длину пружины и доверительный интервал для нее
, ![]()
Подвесим груз массы к закрепленной вертикальной пружине жесткости и толкнем его легонько вниз. Начнутся гармонические колебания, период которых равен (см. , стр 76). Выразим массу груза через период колебаний
Дифференциальные уравнения можно линеаризовать следующими методами:
1. нелинейная функция рабочей области раскладывается в ряд Тейлора.
2. Заданные в виде графов нелинейные функции линеаризуются в рабочей плоскости прямыми.
3. Вместо непосредственного определения частных производных, вводятся переменные в исходные нелинейные уравнения.
 ,
,
 .
(33)
.
(33)
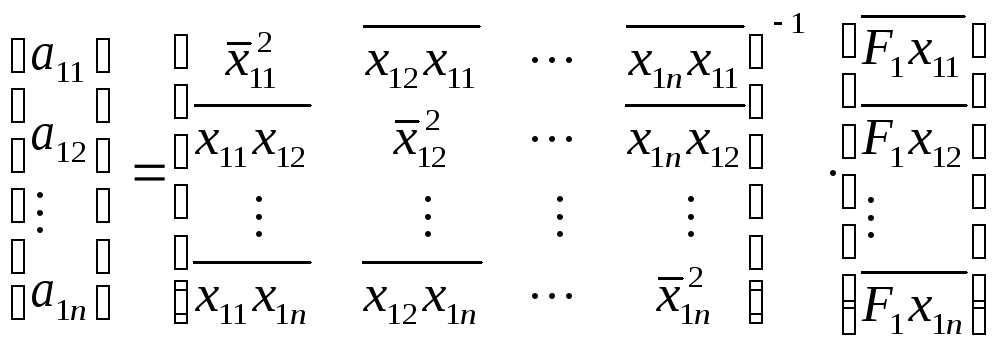
4. Данный метод основан на определении коэффициентов по методу наименьших квадратов.
 ,
(34)
,
(34)
где
 - постоянное времени пневмопривода;
- постоянное времени пневмопривода;
 - передаточный
коэффициент пневмопривода;
- передаточный
коэффициент пневмопривода;
 - коэффициент
демпфирования пневмопривода.
- коэффициент
демпфирования пневмопривода.
Внутреннее строение элементов САР наиболее просто определяется с помощью структурных схем графов. В отличие от известных структурных схем в графах, переменные указываются в виде времени, а дуги обозначают или параметры, или передаточные функции типовых звеньев. Между ними существует четное соотношение.
![]()
![]()
![]()
![]()
![]()


Мм нелинейных элементов
Рассмотренные в первой главе методы линеаризации применимы, когда нелинейность, входящая в объект ЛСА, хотя бы один раз дифференцируема или аппроксимируется касательной с малой погрешностью некоторой окрестности близкой к рабочей точке. Существует целый класс нелинейностей, для которых оба условия не выполняются. Обычно это существенные нелинейности. К ним относятся: ступенчатые, кусочно-линейные и многозначные функции с точками разрыва первого рода, а также степенные и транстендентые функции. Использование УВМ, обеспечивающих выполнение логико-алгебраических операций в системах привело к новым типам линейностей, которые представляют через непрерывные переменные с помощью специальной логики.
Для математического описания таких нелинейностей применяют эквивалентные передаточные функции, зависящие от коэффициентов линеаризации, которые получают путем минимизации среднего квадрата ошибки воспроизведения заданного входного сигнала. Форма входных сигналов, поступающих на вход нелинейностей может быть произвольна. На практике наиболее распространение получили гармонические и случайные виды входных сигналов и их временные комбинации. Соответственно и методы линеаризации называются гармоническими и статическими.
Общий метод описания эквивалентных передаточных функций нэ
Весь класс
существенных нелинейностей разделены
на две группы. К первой группе относится
однозначные нелинейности, у которых
связь между входными
 и выходными
и выходными векторными сигналами зависит только
от формы статической характеристики
нелинейности
векторными сигналами зависит только
от формы статической характеристики
нелинейности .
.
 .
.

В этом случае, при определенной форме входных сигналов:
 .
.
С помощью матрицы
линеаризации
 можно найти приближенное значение
выходных сигналов:
можно найти приближенное значение
выходных сигналов:
 .
.
Из (42) следует, что матрица коэффициентов линеаризации однозначных нелинейностей, является действительными величинами и их эквивалентные передаточные функции:
 .
.
Ко второй группе относят двузначные (многозначные) нелинейности, у которых связь между входными и выходными сигналами зависит не только от формы статической характеристики, но так же определяется предысторией входного сигнала. В этом случае выражение (42) запишется в виде:

 .
.
Для учета влияния
предыстории входного периодического
сигнала будем учитывать не только сам
сигнал
 ,
но и скорость его изменения, дифференциал
,
но и скорость его изменения, дифференциал .
.
При входных сигналах:
 приближенное
значение входного сигнала будет:
приближенное
значение входного сигнала будет:
где
 и
и - коэффициенты гармонической линеаризации
двухзначных нелинейностей;
- коэффициенты гармонической линеаризации
двухзначных нелинейностей;
 - период колебания
по правой гармонике;
- период колебания
по правой гармонике;
 - гармоническая
функция.
- гармоническая
функция.
Эквивалентная передаточная функция:
Существуют нелинейности более общего вида:
 ,
,
 ,
,
где
 и
и - коэффициенты гармонической линеаризации;
- коэффициенты гармонической линеаризации;
 - номер гармоники.
- номер гармоники.
Матрицы коэффициентов
линеаризации периодической с периодом
 .
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
.
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
Пользуясь определим обобщенную формулу для вычисления передаточной функции однозначных и двухзначных нелинейностей.
В случае однозначной
нелинейности матрица коэффициентов
линеаризации
 ,
зависящей от параметров вектора
,
зависящей от параметров вектора ,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным
,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным и приближенным
и приближенным сигналами на входе:
сигналами на входе:
После преобразований,
упрощений, ухищрений и усиления
бдительности, получим эквивалентную
передаточную функцию в виде системы
матриц:
 ,
, .
.
 ,
,
при
 ,
, .
.
 .
.
Определить коэффициент линеаризации для однозначной нелинейности. Когда на ее вход поступает первая гармоника синусоидального сигнала:
где
 .
.
 .
.
Уравнение (56)
представляет собой коэффициент
линеаризации по первой гармонике для
однозначной нелинейности, она определяет
эквивалентную передаточную функцию
 .
.
В дальнейшем сравнение формулы для определения коэффициентов линеаризации простейших нелинейностей при подаче на их вход периодических сигналов: синусоидального, треугольного, покажем целесообразность применения получаемых эквивалентных передаточных функций.
Коэффициент
линеаризации определим
 ,
, .
.
 ,
,
 .
.
Пример. Определить коэффициент линеаризации двузначной нелинейности, когда на ее вход поступает первая гармоника синусоидального сигнала и имеет один вход. Из системы матриц (60), получим:
 ,
,
 .
.
В данном примере входной сигнал запишем в виде:
 ,
,
 .
.
Когда для двузначной нелинейности общая эквивалентная функция:
 .
.
.
.
 Education in Great Britain - Образование в Великобритании (5), устная тема по английскому языку с переводом
Education in Great Britain - Образование в Великобритании (5), устная тема по английскому языку с переводом Иван петрович павлов, открытия
Иван петрович павлов, открытия Мария значение имени - характер и судьба
Мария значение имени - характер и судьба